
Als der Bioniker Leif Kniese beim Angeln einen Fisch in der Hand hielt und mit Daumen gegen die Schwanz des Fischs drückte, bog sich der Schwanz nicht wie erwartet in Druckrichtung weg, sondern um seinen Daumen.
Orientiert man sich an der inneren Struktur der Fischflosse und ahmt deren elastische Bauweise mit technischen Mitteln nach, kann man das Prinzip kreativ in andere Bereiche übertragen. So entwickelte zum Beispiel die Firma Festo, ein Unternehmen, das weltweit führend in der Automatisierungstechnik ist, einen Greifarm, dessen drei Finger sich dem zu greifenden Gegenstand anpassen. Der Greifarm schafft es, auch leicht zerbrechliche und unterschiedlich geformte Objekte sicher zu halten. Ein traditioneller Robotorarm wäre hier nicht sensibel genug.
(Quelle: https://www.investieren-in-sachsen-anhalt.de/report-invest/newsletter-iisa/2016/12/fin-ray-effekt)
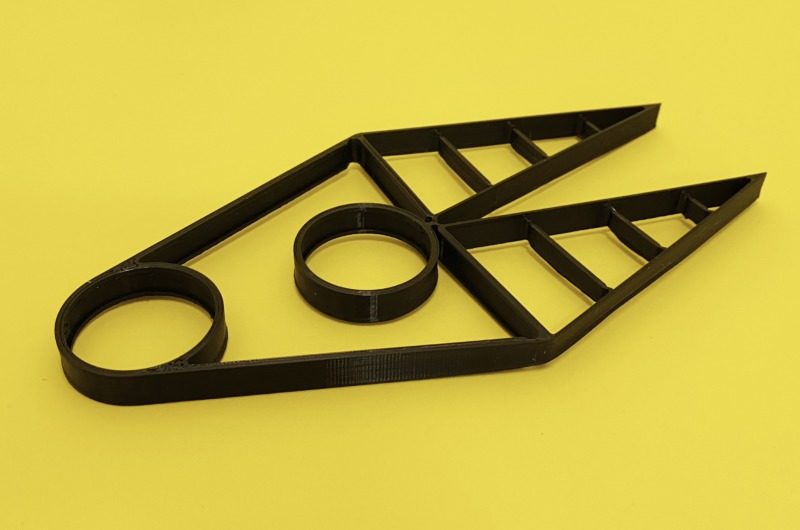
Um meinen Studierenden den Fin-Ray-Effect nicht nur mit Videos zu demonstrieren, habe ich diesen Greifer gedruckt.
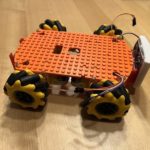
Die Vorlage funktioniert schon recht gut. Allerdings dürfen die Gegenstände nicht zu schwer sein, da die Halterungen brechen können. Ein großes Ei halte ich schon für sehr gewagt. Daher habe ich für Demo-Zwecke einen Tischtennisball, einen Holzklotz und ein Auto (unregelmäßige Form) genommen.
Der Greifer funktioniert noch besser, wenn man noch Moosgummi oder grobes Schleifpapier auf die Greif-Flächen klebt.
Der Druck hat mit PLA-Filament sehr gut geklappt, dauert je nach Größe zwischen 30min bis 2 Stunden. Ich habe beim Slicer nur die Vorlage vergrößert.
Foto: Bionischer Greifer (Fin-Ray-Effect), H.M. Krause, CC BY 4.0
Video: Bionic Claw, Hollerer, CC BY-NC-SA 4.0
-
PLA-Filament, Moosgummi für besser Griffigkeit
- https://www.thingiverse.com/thing:97618























Keine Kommentare
Hinterlasse ein Kommentar Abbruch